Asymptote Gallery Tagged by “Texpath” #77
generalities-fig059

Show generalities/fig0590.asy on Github.
Generated with Asymptote 3.00-0.
Categories : Examples 2D | Generalities
Tags : #Basis | #Shading | #Tex/latex features | #Texpath | #Fill/Unfill | #Array
size(16cm,0); path[] P=texpath("$\displaystyle\int_{-\infty}^{+\infty}e^{-\alpha x^2}\,dx= \sqrt{\frac{\pi}{\alpha}}$"); pair m=min(P), M=max(P); axialshade(P,yellow,m,red,(m.x,M.y)); draw(P,0.5*blue); shipout(bbox(3mm,Fill));
three-fig010

Show three/fig0100.asy on Github.
Generated with Asymptote 3.00-0.
Categories : Examples 3D | Three.asy
Tags : #Plane | #Label (3D) | #Texpath | #Transform (3D) | #Projection (3D) | #Bsp
size(12cm,0); import bsp; currentprojection=orthographic(1,1.5,1); path3 xy=plane((1,0,0),(0,1,0),(0,0,0)); path3 xz=rotate(90,X)*xy; path3 yz=rotate(-90,Y)*xy; face[] f; filldraw(f.push(xy),project(xy),grey); filldraw(f.push(xz),project(xz),grey); filldraw(f.push(yz),project(yz),grey); add(f); draw(Label("$x$",EndPoint), O--(1,0,0), Arrow3); draw(Label("$y$",EndPoint), O--(0,1,0), Arrow3); draw(Label("$z$",EndPoint), O--(0,0,1), Arrow3); dot(O); path[] ph=texpath("$\displaystyle\int_{-\infty}^{+\infty}e^{-\alpha x^2}\,dx= \sqrt{\frac{\pi}{\alpha}}$"); ph =shift((0.5,0.5))*rotate(-45)*scale(1/abs(min(ph)-max(ph)))*ph; filldraw(project(path3(ph,XYplane)),0.8*yellow); filldraw(project(path3(ph,ZXplane)),0.8*yellow); filldraw(project(path3(ph,YZplane)),0.8*yellow);
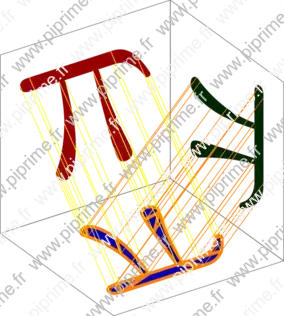
three-fig011
Show three/fig0110.asy on Github.
Generated with Asymptote 3.00-0.
Categories : Examples 3D | Three.asy
Tags : #Plane | #Label (3D) | #Texpath | #Transform (3D) | #Projection (3D)
import three; size(10cm,0); currentprojection=orthographic(1,1.5,1); path3 xy=XY*unitsquare3, xz=ZX*unitsquare3, yz=YZ*unitsquare3; draw(xy^^xz^^yz, grey); path3 p3xy=path3(texpath("$\pi$")[0],XYplane); p3xy=shift((0.5,0.5,0))*scale3(1/abs(min(p3xy)-max(p3xy)))*p3xy; surface s=surface(p3xy,planar=true); draw(s, surfacepen=blue, meshpen=orange+3pt); transform3 Txz=planeproject(xz,(0,-1,1)); draw(Txz*s, red); transform3 Tyz=planeproject(yz,(-1,0,1)); draw(Tyz*s, green); path3 p3xz=Txz*p3xy; path3 p3yz=Tyz*p3xy; int lg=length(p3xy); triple p; for(int i=0;i<=lg;++i) { p=point(p3xy,i); draw(p--point(p3xz,i), yellow); draw(p--point(p3yz,i), orange); }