Figure Asymptote various -- 008
This picture comes from the Asymptote gallery of topic various
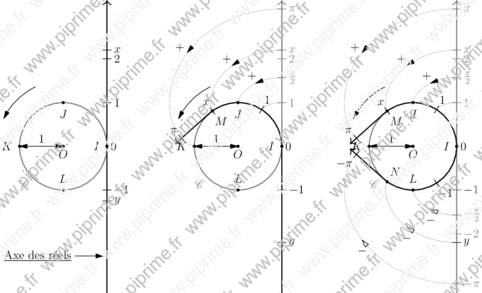
Show various/fig0405.asy on Github.
Generated with Asymptote 3.00-0.
Categories : Miscellaneous
Tags : #Transform | #Picture
// PDF version of this picture: /home/pi/code/pi/asymptote/asymptote-exemples-builder/build/asy/various/fig0405.pdf import labelpath; size(17cm,0); usepackage("mathrsfs, amsfonts,amsmath,amssymb"); picture pic, pic1, pic2, pic3; real u=1, Y=pi+0.2; path cle=scale(u)*unitcircle; path arcg=arc((0,0),1.5*u,115,155); void addtick(picture pic=currentpicture, Label L, pair z, pair dir=E, pen p=currentpen) { transform R=rotate(degrees(dir)); real width=1.5mm; Label L=L.copy(); L.position(z); L.align(NoAlign,E); L.align.dir=R*L.align.dir*1.3*width/mm; L.p(p); pic.add(new void(frame f, transform t) { path g=(-width,0)--(width,0); picture opic; draw(opic,shift(t*z)*R*g,p); add(f,opic.fit()); }); add(pic,L); } path roll(picture pic=currentpicture, real x, int nb=50) { real stp=x/(nb-1); return operator --(... sequence(new guide(int t){ real tt=t*stp; return shift(expi(tt))*((x-tt)*(-sin(tt),cos(tt))); },nb)); } labelpath("\tiny Sens direct",reverse(arcg)); draw(arcg, Arrow()); draw(Label("$\mathscr{C}$",Relative(0.625)), cle,bp+grey); dot("$O$", (0,0), S); dot("$0$", point(cle,0)); dot("$I$", point(cle,0), 2*W); dot("$J$", point(cle,1), 2*S); dot("$K$", point(cle,2), 2*W); dot("$L$", point(cle,3), 2*N); draw("$1$",(0,0)--point(cle,2),Arrows); pic.add(currentpicture);// Save the common picture. // Starting picture 1 pair yM=(u,Y*u), ym=(u,-Y*u); draw(ym--yM, linewidth(bp), Arrow(TeXHead)); arrow("\underline{Axe des r\'eels}",(u,-0.75*Y*u),W,1cm); real x=2.2, y=-1.25; addtick(Label("$1$", align=E),(u,1)); addtick(Label("$2$", align=E),(u,2)); addtick(Label("$-1$", align=E),(u,-1)); addtick(Label("$x$", align=E),(u,x)); addtick(Label("$y$", align=E),(u,y)); pic1.add(currentpicture); erase(); // Starting picture 2 add(pic); real t=x+0.1; draw((u,0)--yM, bp+grey, Arrow(TeXHead)); path tg=arc((0,0),u,0,degrees(t)); draw(tg,linewidth(bp)); addtick(Label("$1$", align=E),u*(cos(1),sin(1)),dir(degrees(1.0))); addtick(Label("$1$", align=E),(u,1), grey); addtick(Label("$2$", align=E),(u,2),grey); addtick(Label("$\frac{\pi}{2}$", align=E),(u,pi/2),grey); addtick(Label("$\pi$", align=E),(u,pi),grey); addtick(Label("$-1$", align=E),(u,-1)); addtick(Label("$x$", align=E),(u,x), grey); addtick(Label("$x$", align=E),u*(cos(x),sin(x)),dir(degrees(x))); addtick(Label("$y$", align=E),(u,-x)); dot("$M$", u*expi(x), -2*u*expi(x)); draw(Label("+",Relative(0.5)), roll(x), dotted, Arrow(Relative(0.5))); draw(roll(1), dotted); draw(Label("+",Relative(0.5)), roll(pi/2), dotted, Arrow(Relative(0.5))); draw(Label("+",Relative(0.5)), roll(pi,100), dotted, Arrow(Relative(0.5))); path g=u*expi(t)--shift(u*expi(t))*((Y-t)*u*expi(pi/2+t)); draw(g,linewidth(bp), Arrow(TeXHead)); addtick(Label("$\pi$", align=E),arcpoint(g,(pi-t)*u),expi(t)); pic3.add(currentpicture); draw(ym--(u,0), linewidth(bp)); pic2.add(currentpicture); erase(); // Starting picture 3 draw(ym--(u,0), linewidth(bp)+grey); path tg=arc((0,0),u,0,degrees(-t)); draw(tg,linewidth(bp)); addtick(Label("$-1$", align=E),u*(cos(-1),sin(-1)),dir(degrees(-1.0))); addtick(Label("$-1$", align=E),(u,-1), grey); addtick(Label("$-2$", align=E),(u,-2),grey); addtick(Label("$-\frac{\pi}{2}$", align=E),(u,-pi/2),grey); addtick(Label("$-\pi$", align=E),(u,-pi),grey); dot("$N$", u*expi(-x), -2*u*expi(-x)); g=roll(-x); draw(Label("$-$",align=2*I*dir(g,0.5),Relative(0.5)), g, dotted, Arrow(NoFill,Relative(0.5))); g=roll(-1); draw(g, dotted); g=roll(-pi/2); draw(Label("$-$",align=2*I*dir(g,0.5),Relative(0.5)), g, dotted, Arrow(NoFill,Relative(0.5))); g=roll(-pi,100); draw(Label("$-$",align=2*I*dir(g,0.5),Relative(0.5)), g, dotted, Arrow(NoFill,Relative(0.5))); g=u*expi(-t)--shift(u*expi(-t))*((Y-t)*u*expi(-pi/2-t)); draw(g, linewidth(bp), Arrow(TeXHead)); addtick(Label("$-\pi$", align=E),arcpoint(g,(pi-t)*u),expi(-t)); //////////////////////////////////////////////////////////// pic3.add(currentpicture); erase(); add(pic1); add(shift(4*u,0)*pic2); add(shift(8*u,0)*pic3); shipout(format="pdf");